Setting¶
We consider a stochastic system described by a stochastic differential equation (SDE)
with drift \(f(x,t)\) and diffusion \(\sigma(x,t)\).
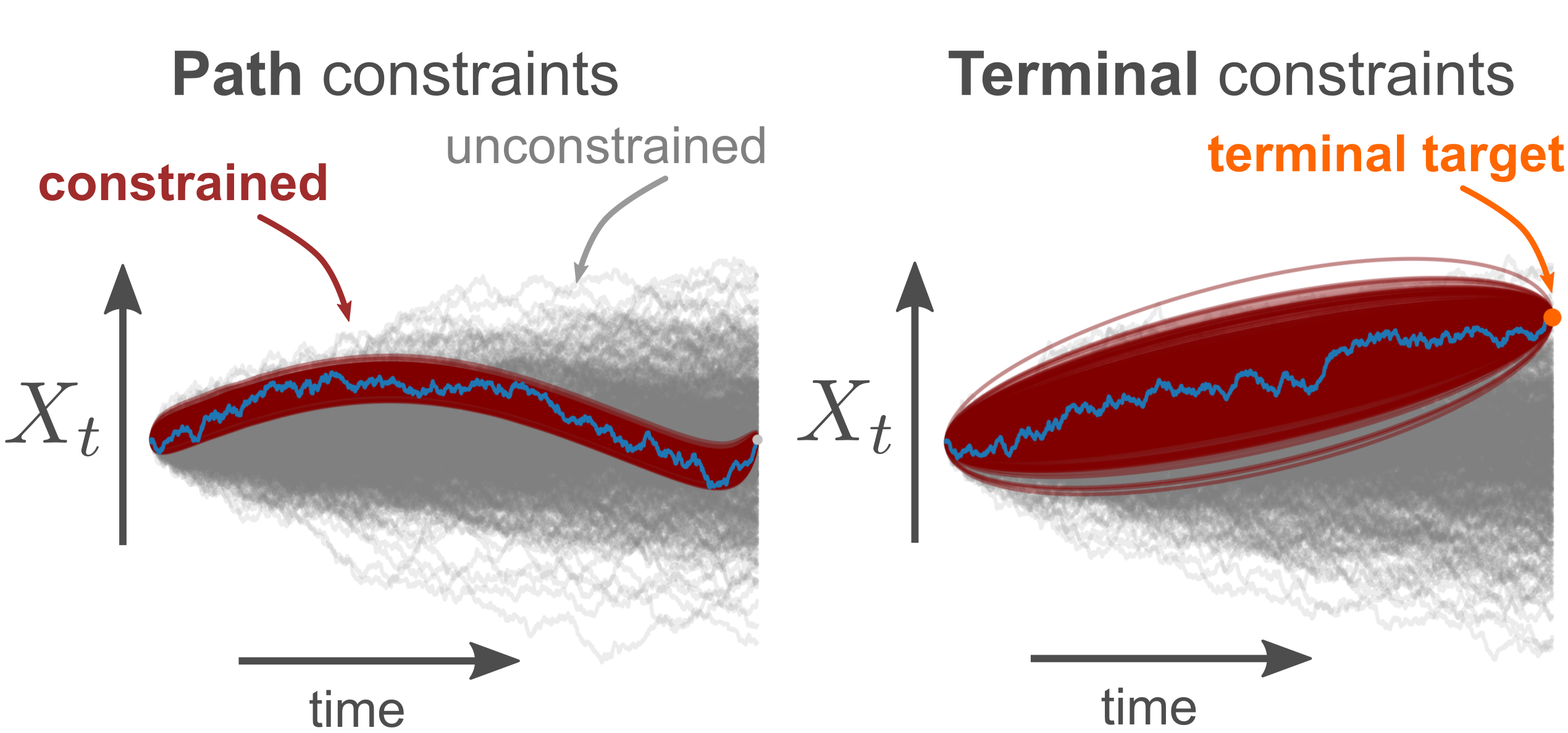
We want to constrain the dynamics of this system for a time interval \([0,\,T]\)
either to reach some target state \(x^*\) at time T (terminal constraint),
and/or to visit/avoid specific regions of the state space (path constraints).
We implement the constraints in terms a time- and state-dependent perturbation of the deterministic part of the dynamics, i.e. we apply interventions \(u(x,t)\) and the controlled system dynamics become
Following the assumptions of the Path Integral control formalism, i.e. assuming that control costs are inversely proportional of noise variance (see [Maoutsa2021a] , [Maoutsa2021b] for more details), we can show that the interventions \(u(x,t)\) can be obtained from the logarithmic gradient of the solution of a backward partial differential equation rescaled by the noise variance.
Here, instead of solving the backward PDE to obtain the optimal drift adjustment that implements the constraints, we express the optimal interventions as the difference of the logarithmic gradient of two probability flows, \(\rho_t(x)\) and \(q_t(x)\). The probability flow or density \(\rho_t(x)\) satisfies the forward filtering equation, a forward PDE that in the absence of path constraints is the Fokker–Planck equation of the uncontrolled dynamics, while \(q_t(x)\) is the marginal constrained density that in turn satisfies the Fokker–Planck equation of the optimally controlled dynamics.
- Maoutsa2021a
Maoutsa Dimitra, Opper Manfred. (2021). Deterministic Particle flows for constraining SDEs . Machine Learning and the Physical Sciences, Workshop at the 35th Conference on Neural Information Processing Systems (NeurIPS).
- Maoutsa2021b
Maoutsa Dimitra, Opper Manfred. (2021). Deterministic particle flows for constraining stochastic nonlinear systems . Preprint.